


1. Актуальность проблемы.
В диапазоне подач до 100 м³/сут среди всех типов насосных систем глубинные плунжерные насосы имеют самый высокий КПД. Поэтому УШГН (установки штанговых глубинных плунжерных насосов) являются основным типом насосных систем для добычи нефти из малодебитных (с суточным дебитом до 20 м³/сут) и частично среднедебитных (с суточным дебитом до 100 м³/сут) скважин. Установки данного типа с поверхностным приводом и штанговой трансмиссией экономичны и надежны в эксплуатации при подвеске насосов в вертикальных участках скважин на не очень больших глубинах (до 1800-2000м).
В настоящее время в качестве поверхностного привода УШГН применяются СК (станки- качалки балансирные ) ПЦ (цепные привода) и ГП (гидропривода). Станок- качалка и является наименее экономичным приводом с точки зрения энерго- потребления. Но именно СК является самом надежным среди ранее перечисленных типов приводов. Это и обеспечило ему наиболее широкое применение в нефтепромысловой практике.
К существенным недостаткам станка качалки следует отнести:
- большую материалоемкость СК,
- необходимость обустройства массивного фундамента для СК,
- трудность точной балансировки СК ,
- неоптимальная траектория движения полированного штока со штанговой подвеской ( что снижает срок эксплуатации штанг и глубинного насоса из-за высоких динамических нагрузок на внутрискважинное оборудование ),
- сравнительно большое время, требуемое на монтаж и демонтаж СК. Перечисленные недостатки СК а также недостаточная надежность ЦП и ГП на ряду с высокой стоимостью всех перечисленных типов приводов обусловили появление нового типа привода УШГН, так называемого «Линейного привода». Поверхностный «линейный» привод УШГН — типа LRP
2. «Линейный» привод УШГН.
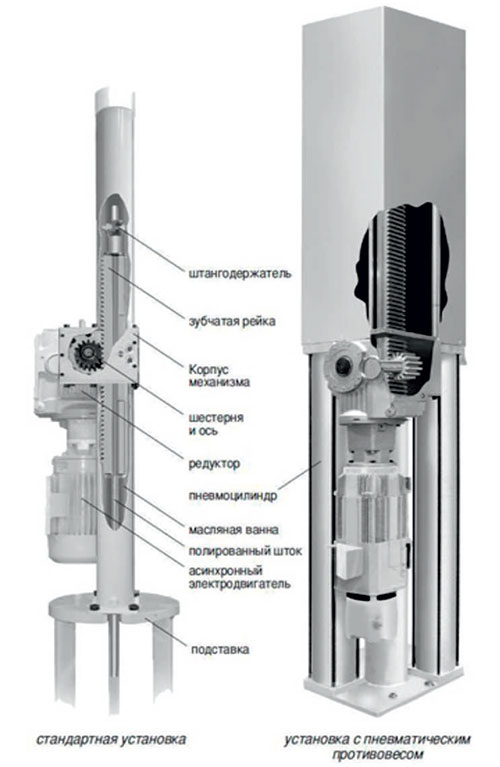 «Линейный» привод УШГН — LRP был разработан компанией «UNICO Inc» (США) в середине прошлого десятилетия. Первые его образцы внедрены в нефтедобычу в 2007г. Менее чем за 10 лет этот тип привода стал применяться нефтяными компаниями США, Канады, Мексики, Китая, стран ЕС, Казахстана , России и т.д. На рисунке представлена принципиальная схема привода LRP.
«Линейный» привод УШГН — LRP был разработан компанией «UNICO Inc» (США) в середине прошлого десятилетия. Первые его образцы внедрены в нефтедобычу в 2007г. Менее чем за 10 лет этот тип привода стал применяться нефтяными компаниями США, Канады, Мексики, Китая, стран ЕС, Казахстана , России и т.д. На рисунке представлена принципиальная схема привода LRP.
Ключевым решением системы LRP является применение новой кинематической схемы — реечная передача с непосредственным приводом на реверсивный асинхронный электродвигатель, обеспечивающий возвратно- поступательное движение штока насоса в широком диапазоне заданных параметров.
Результатом применения такой схемы стало практически полное снижение инерции при движении насоса и как следствие — контроль скорости его движения в любой точке динамического цикла.
Управление мотором обеспечивает система контроля, работающая на основании разработанной математической модели скважины, что позволяет управлять параметрами добычи в реальном времени и автоматически подстраиваться под оптимальные режимы добычи без участия оператора.
Объединение описанных выше инженерных решений в одну систему позволило серьезно усовершенствовать параметры работы привода линейного штангового насоса и кардинально улучшить все показатели:
- Управление частотой качаний насоса, которая может быть задана в пределах от 0 до 20 тактов в минуту
- Полная автоматизация процесса добычи по заданным алгоритмам. Автоматическая подстройка под меняющиеся параметры скважины. Управление параметрами добычи с удаленного доступа.
- Уменьшение износа скважинного оборудования. Увеличение межремонтных интервалов скважины в 4 раза! Достигается за счет управления скоростью движения насоса в реальном времени и позволяет снизить нагрузку на шток и насос в крайних точках с наибольшей нагрузкой — при погружении в жидкость и при подъеме.
- Снижение затрат на обустройство скважины. Не требуется сооружения фундамента. Система крепится на устье скважины (на планшайбе) . Возможность быстрой установки и демонтажа системы с целью переноса на другую скважину. Возможность использования для определения дебета любой скважины!
- Несравнимо низкие затраты на транспортировку за счет малых габаритов и веса. · Строго вертикальное движение полированного штока снижает предельные нагрузки на штанговую подвеску и насос.
- Высокая надежность работы LRP. Самые низкие затраты на эксплуатацию! Одна точка смазки. Замена масла в редукторе — 1 раз/год.
3. Краткое описание работы системы LRP.
Привод насоса устанавливается непосредственно на устье скважины. Полированная насосная штанга проходит через канал внутри стойки и поддерживается сверху при помощи обычного штангодержателя. Насосная штанга способна двигаться внутри стойки в случае прихвата штока или насоса.
Асинхронный электромотор соединенный с реечным механизмом посредством коробки передач, двигает стойку вверх и вниз для перемещения штанговой колонны. Во время каждого шага стойка смазывается посредством погружения в полностью закрытую масляную ванну. При необходимости, нагрузка может быть уравновешена при помощи воздушного цилиндра через который проходит полированный шток.
Здесь для обеспечения обратной связи может использоваться сенсор давления, однако система LRP работает и без сенсора. Таким образом, в сравнении с традиционными станками-качалками, более компактный привод системы LRP™ обеспечивает лучшую производительность при меньших габаритах и затратах на установку.
4. «Линейный» привод УШГН-ТОП.
Компания «ТатОйлПром» приступила к проектированию и подготовки производства собственного «Линейного» привода в котором используются основные идеи заложенные в LRP. Мы учли недостатки американской системы, выявленные в результате промысловых испытаний проведенных в России. Проектируемый привод будет иметь длину хода не менее 2.5 м и рассчитан на нагрузку до 12т. Срок изготовления опытного образца для промысловых испытаний –2 квартал 2016г.